Теорема об изменении кинетической энергии пример. Referat
Данная теорема устанавливает количественную взаимосвязь между работой силы (причиной) и кинетической энергией материальной точки (следствием).
Кинетической энергией материальной точки называется скалярная величина, равная половине произведения массы точки на квадрат ее скорости
 .
(43)
.
(43)
Кинетическая энергия характеризует то механическое действие силы, которое может превратиться в другие виды энергии, например, в тепловую.
Работой силы на данном перемещении называется характеристика того действия силы, которое приводит к изменению модуля скорости.
Элементарная работа силы определяется как скалярное произведение вектора силы на элементарный вектор перемещения в точке ее приложения

 ,
(44)
,
(44)
где
 -
элементарное перемещение.
-
элементарное перемещение.
Модуль элементарной работы определяется формулой
где
- угол между вектором силы и вектором
элементарного перемещения;
 -
проекция вектора силы на касательную.
-
проекция вектора силы на касательную.
Полная работа на некотором конечном перемещении определяется интегралом
 .
(46)
.
(46)
Из (46) следует, что полная работа может быть вычислена в двух случаях, когда сила постоянная или зависит то перемещения.
При
F
=const
получаем
 .
.
При решении задач часто удобно пользоваться аналитическим способом вычисления силы
где F x , F y , F z – проекции силы на координатные оси.
Докажем следующую теорему.
Теорема : Изменение кинетической энергии материальной точки на некотором ее перемещении равно работе силы, действующей на точку, на том же перемещении.
Пусть материальная точка M массы m движется под действием силы F из положения M 0 в положение M 1 .
ОУД:
 .
(47)
.
(47)
Введем
подстановку
 и спроектируем (47)
на касательную
и спроектируем (47)
на касательную
 .
(48)
.
(48)
Разделяем в (48) переменные и интегрируем

В результате получим
 .
(49)
.
(49)
Уравнение (49) доказывает сформулированную выше теорему.
Теоремой удобно пользоваться, когда среди заданных и искомых параметров присутствуют масса точки, ее начальная и конечная скорость, силы и перемещение.
Вычисление работы характерных сил.
1. Работа силы тяжести вычисляется как произведение модуля силы на перемещение точки ее приложения по вертикали
 .
(50)
.
(50)
При перемещении вверх работа положительная, при перемещении вниз – отрицательная.
2. Работа упругой силы пружины F =-cx равна
 ,
(51)
,
(51)
где x 0 – начальное удлинение (сжатие) пружины;
x 1 – конечное удлинение (сжатие) пружины.
Работа силы тяжести и упругой силы не зависят от траектории перемещения их точек приложения. Такие силы, работа которых не зависит от траектории, называются потенциальными силами .
3. Работа силы трения .
Так как сила трения всегда направлена в сторону, противоположную направлению перемещения, то ее работа равна
Работа силы трения всегда отрицательная . Силы работа которых всегда отрицательна, называются диссипативными .
Энергией называется скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F ∙s . Модуль силы по второму закону Ньютона равен F = m∙a , а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ 1 и конечной υ 2 скорости и ускорения а выражением \(~s = \frac{\upsilon^2_2 - \upsilon^2_1}{2a}\) .
Отсюда для работы получаем
\(~A = F \cdot s = m \cdot a \cdot \frac{\upsilon^2_2 - \upsilon^2_1}{2a} = \frac{m \cdot \upsilon^2_2}{2} - \frac{m \cdot \upsilon^2_1}{2}\) . (1)
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела .
Кинетическая энергия обозначается буквой E k .
\(~E_k = \frac{m \cdot \upsilon^2}{2}\) . (2)
Тогда равенство (1) можно записать в таком виде:
\(~A = E_{k2} - E_{k1}\) . (3)
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ , то работа силы равна конечному значению кинетической энергии тела:
\(~A = E_{k2} - E_{k1}= \frac{m \cdot \upsilon^2}{2} - 0 = \frac{m \cdot \upsilon^2}{2}\) . (4)
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы , работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы , работа которых зависит от формы траектории, называются непотенциальными . При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
Найдем работу, совершаемую силой тяжести F т при перемещении тела массой m вертикально вниз с высоты h 1 над поверхностью Земли до высоты h 2 (рис. 1). Если разность h 1 – h 2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести F т во время движения тела можно считать постоянной и равной mg .
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести F т = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.

Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h ’, h ’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h 1 и h 2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С .
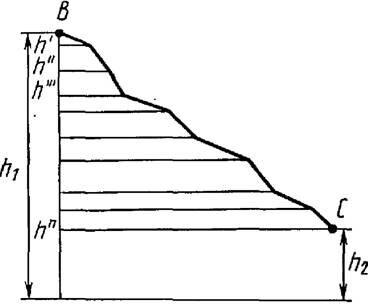
Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h 2 , в точку, расположенную на высоте h 1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
\(~A = - (E_{p2} - E_{p1})\) . (9)
Потенциальная энергия обозначается буквой Е p .
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Е p тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m , находящееся на высоте h , где h < h 0 (h 0 – нулевая высота), обладает отрицательной потенциальной энергией:
\(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М , находящихся на расстоянии r одна от другой, равна
\(~E_p = G \cdot \frac{M \cdot m}{r}\) . (11)
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Е p = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, M e – масса Земли, R e – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
\(~E_e = G \cdot \frac{M_e \cdot m \cdot h}{R_e \cdot (R_e +h)}\) . (12)
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « R e) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac{M_e}{R^2_e}\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x 1 до конечного значения x 2 (рис. 4, б, в).

Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x ) и умножить на модуль перемещения:
\(~A = F_{upr-cp} \cdot (x_1 - x_2)\) , (13)
где \(~F_{upr-cp} = k \cdot \frac{x_1 - x_2}{2}\) . Отсюда
\(~A = k \cdot \frac{x_1 - x_2}{2} \cdot (x_1 - x_2) = k \cdot \frac{x^2_1 - x^2_2}{2}\) или \(~A = -\left(\frac{k \cdot x^2_2}{2} - \frac{k \cdot x^2_1}{2} \right)\) . (14)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
\(~E_p = \frac{k \cdot x^2}{2}\) . (15)
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (16)
Если x 2 = 0 и x 1 = х , то, как видно из формул (14) и (15),
\(~E_p = A\) .
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано . Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
\(~A = -(E_{p2} - E_{p1})\) . (17)
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
\(~A = E_{k2} - E_{k1}\) . (18)
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
\(~E_{k2} - E_{k1} = -(E_{p2} - E_{p1})\) или \(~E_{k1} + E_{p1} = E_{k2} + E_{p2}\) . (19)
Закон сохранения энергии в механических процессах :
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией .
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υ нач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Е p = m∙g∙h ). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Е k = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы :
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_{vn} = \Delta E = E - E_0\) . (20)
где Е и Е 0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения F r тела составляет π радиан, работа силы трения отрицательна и равна
\(~A_{tr} = -F_{tr} \cdot s_{12}\) ,
где s 12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения F tr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
\(~A_{tr} = F_{tr} \cdot s_{12}\) ,
Пример 1 . Пусть, внешняя сила F действует на брусок В , который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения F tr2 , действующей на тележку со стороны бруска, положительна:

Пример 2 . При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):

Литература
- Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. – М.: Просвещение, 1991. – 367 с.
- Кикоин И.К., Кикоин А.К. Физика: Учеб. для 9 кл. сред. шк. – М.: Про-свещение, 1992. – 191 с.
- Элементарный учебник физики: Учеб. пособие. В 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механика. Теплота. Молекулярная физика. – М.: Физматлит, 2004. – 608 с.
- Яворский Б.М., Селезнев Ю.А. Справочное руководство по физике для поступающих в вузы и самообразования. – М.: Наука, 1983. – 383 с.
механической системы
Кинетической энергией механической системы называется арифметическая сумма кинетических энергий всех ее материальных точек
Вычисление кинетической энергии твердого тела
1. Поступательное движение
Как известно, при поступательном движении скорости всех точек тела в один и тот же момент времени равны, тогда (83) можно представить в виде
 .
(84)
.
(84)
При поступательном движении тела, его кинетическая энергия равна половине произведения массы на квадрат скорости центра масс.
2. Вращательное движение твердого тела
П ри
вращательном движении скорость каждой
точки тела
ри
вращательном движении скорость каждой
точки тела
 .
(85)
.
(85)
Подставим (85) в (83):
 .
.
Принимая во внимание (59), получим
 .
(86)
.
(86)
При вращательном движении кинетическая энергия равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости.
3 . Плоское движение
Плоское движение можно представить как вращение относительно полюса (например, центра масс) и движения вместе с полюсом, тогда
 .
(87)
.
(87)
Кинетическая энергия тела при плоском движении равна сумме кинетических энергий от поступательного движения вместе с центром масс и вращательного движения относительно центра масс.
Теорема: Изменение кинетической энергии механической системы на некотором ее перемещении равно сумме работ всех внутренних и внешних сил системы на том же перемещении
 .
(88)
.
(88)
Замечания :
1. Введенная величина кинетической энергии системы в отличие от количества движения системы и кинетического момента является скалярной величиной. При этом:
Q =0 при вращательном движении и покое;
K O =0 при поступательном движении или покое;
T
Таким образом, в отличие от теоремы об изменении количества движения и кинетического момента, данная теорема пригодна для изучения любого вида движения, так как T =0 только для неподвижной системы.
2. В отличие от упомянутых теорем данная теорема учитывает действие внутренних сил системы.
Некоторые случаи вычисления работы
1. Работа момента силы M Z относительно оси равна произведению момента на угол поворота тела относительно оси
 .
(89)
.
(89)
2. Сумма работ внутренних сил абсолютно твердого тела (недеформируемого) всегда равна нулю.
3.
Работа
момента трения качения
 .
.
 ,
,
где - коэффициент трения качения;
R – радиус цилиндра;
s – длина дуги, равная отрезку пути, пройденного центром масс C вдоль поверхности;
 -
угол поворота осей цилиндра в процессе
движения;
-
угол поворота осей цилиндра в процессе
движения;
N – нормальная реакция поверхности;
P – сила тяжести;
F тр – сила трения скольжения.
Дифференциальные уравнения поступательного, вращательного и плоского движения твердого тела
1. Поступательное движение
При поступательном движении все точки тела движутся по одинаковым траекториям и в один и тот же момент времени имеют одинаковые ускорения. Тогда для описания движения можно использовать теорему о движении центра масс (67). Проектируем это уравнение на координатные оси
Система (90) представляет собой дифференциальные уравнения поступательного движения твердого тела.
2. Вращательное движение
П усть
твердое тело совершает вращение
относительно оси под действием сил.
Динамической характеристикой
вращательного движения твердого тела
является кинетический моментK
z
,
а характеристикой вращательного
действия силы
момент силы относительно оси. Поэтому
для описания вращательного движения
твердого тела относительно неподвижной
оси воспользуемся теоремой об изменении
кинетического момента (81)
усть
твердое тело совершает вращение
относительно оси под действием сил.
Динамической характеристикой
вращательного движения твердого тела
является кинетический моментK
z
,
а характеристикой вращательного
действия силы
момент силы относительно оси. Поэтому
для описания вращательного движения
твердого тела относительно неподвижной
оси воспользуемся теоремой об изменении
кинетического момента (81)
 .
(91)
.
(91)
При
вращательном движении
 ,
тогда
,
тогда
 ,
,
учитывая, что I z =const, в итоге получим
 .
(92)
.
(92)
Уравнение (92) представляет собой дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси.
Найденный угол будет определять положение тела, совершающего вращательное движение, в любой момент времени.
3. Плоское движение
Положение тела, совершающего плоское движение, в любой момент времени определяется положением полюса и углом поворота тела относительно полюса. Если за полюс принять центр масс тела, то уравнение его движения можно найти по теореме о движении центра масс (67), а вращательное движение относительно центра будет определяться уравнением (92), справедливым и для движения системы относительно оси, проходящей через центр масс. Тогда дифференциальные уравнения плоского движения твердого тела имеют вид
Скалярная величина Т, равная сумме кинетических энергий всех точек системы, называется кинетической энергией системы.
Кинетическая энергия является характеристикой поступательного и вращательного движения системы. На ее изменение влияет действие внешних сил и так как она является скаляром, то не зависит от направления движения частей системы.
Найдем кинетическую энергию при различных случаях движения:
1. Поступательное движение
Скорости всех точек системы равны скорости центра масс . Тогда
Кинетическая энергия системы при поступательном движении равна половине произведения массы системы на квадрат скорости центра масс.
2. Вращательное движение (рис. 77)
Скорость любой точки тела: . Тогда
![]()
или используя формулу (15.3.1):
![]()
Кинетическая энергия тела при вращении равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости.
3. Плоскопараллельное движение
При данном движении кинетическая энергия складывается из энергии поступательного и вращательных движений
Общий случай движения дает формулу, для вычисления кинетической энергии, аналогичную последней.
Определение работы и мощности мы сделали в параграфе 3 главы 14. Здесь же мы рассмотрим примеры вычисления работы и мощности сил действующих на механическую систему.
1. Работа сил тяжести
. Пусть , координаты начального и конечного положения точки k тела. Работа силы тяжести действующих на эту частицу веса будет ![]() . Тогда полная работа:
. Тогда полная работа:
где Р - вес системы материальных точек, - вертикальное перемещение центра тяжести С.
2. Работа сил, приложенных к вращающемуся телу .
Согласно соотношению (14.3.1) можно записать , но ds согласно рисунку 74, в силу бесконечной малости можно представить в виде ![]() - бесконечно малый угол поворота тела. Тогда
- бесконечно малый угол поворота тела. Тогда
Величина ![]() называется вращающим моментом.
называется вращающим моментом.
Формулу (19.1.6) перепишем как
Элементарная работа равна произведению вращательного момента на элементарный поворот .
При повороте на конечный угол имеем:

Если вращательный момент постоянен , то
а мощность определим из соотношения (14.3.5)
как произведение вращающего момента на угловую скорость тела.
Теорема об изменении кинетической энергии доказанная для точки (§ 14.4) будет справедлива для любой точки системы

Составляя такие уравнения для всех точек системы и складывая их почленно получаем:

или, согласно (19.1.1):
что является выражением теоремы о кинетической энергии системы в дифференциальной форме.
Проинтегрировав (19.2.2) получаем:
Теорему об изменении кинетической энергии в конечном виде: изменение кинетической энергии системы при некотором ее конечном перемещении равно сумме работ на этом перемещении всех приложенных к системе внешних и внутренних сил.
Подчеркнем, что внутренние силы не исключаются. Для неизменяемой системы сумма работ всех внутренних сил равна нулю и
Если связи, наложенные на систему, не изменяются со временем, то силы, как внешние так и внутренние, можно разделить на активные и реакции связей, и уравнение (19.2.2) теперь можно записать:
В динамике вводится такое понятие как "идеальная" механическая система. Это такая система, наличие связей у которой не влияет на изменение кинетической энергии, то есть
Такие связи, не изменяющиеся со временем и сумма работ которых на элементарном перемещении равна нулю, называются идеальными, и уравнение (19.2.5) запишется:
Потенциальной энергией материальной точки в данном положении М называется скалярная величина П, равная той работе, которую произведут силы поля при перемещении точки из положения М в нулевое
П = А (мо) (19.3.1)
Потенциальная энергия зависит от положения точки М, то есть от ее координат
П = П(х,у,z) (19.3.2)
Поясним здесь, что силовым полем называется часть пространственного объема, в каждой точке которого на частицу действует определенная по модулю и направлению сила, зависящая от положения частицы, то есть от координат х, у, z. Например, поле тяготения Земли.
Функция U от координат, дифференциал которой равен работе, называется силовой функцией . Силовое поле, для которого существует силовая функция, называется потенциальным силовым полем , а силы действующие в этом поле, - потенциальными силами .
Пусть нулевые точки для двух силовых функций П(х,у,z) и U(x,y,z) совпадают.
По формуле (14.3.5) получаем , т.е. dA = dU(x,y,z) и

где U - значение силовой функции в точке М. Отсюда
П(x,y,z) = -U(x,y,z) (19.3.5)
Потенциальная энергия в любой точке силового поля равна значению силовой функции в этой точке, взятому с обратным знаком.
То есть, при рассмотрении свойств силового поля вместо силовой функции можно рассматривать потенциальную энергию и, в частности, уравнение (19.3.3) перепишется как
Работа потенциальной силы равна разности значений потенциальной энергии движущейся точки в начальном и конечном положении.
В частности работа силы тяжести:
Пусть все силы, действующие на систему, будут потенциальными. Тогда для каждой точки k системы работа равна
Тогда для всех сил, как внешних, так и внутренних будет
где - потенциальная энергия всей системы.
Подставляем эти суммы в выражение для кинетической энергии (19.2.3):
или окончательно:
При движении под действием потенциальных сил сумма кинетической и потенциальной энергии системы в каждом ее положении остается величиной постоянной. Это закон сохранения механической энергии.
Груз массой 1 кг совершает свободные колебания согласно закону х = 0,1sinl0t. Коэффициент жесткости пружины с = 100 Н/м. Определить полную механическую энергию груза при х = 0,05м, если при х= 0 потенциальная энергия равна нулю  . (0,5)
. (0,5)
Груз массой m = 4 кг, опускаясь вниз, приводит с помощью нити во вращение цилиндр радиуса R = 0,4 м. Момент инерции цилиндра относительно оси вращения I = 0,2 . Определить кинетическую энергию системы тел в момент времени, когда скорость груза v = 2м/с  . (10,5)
. (10,5)
Кинетическая энергия механической системы - это сумма кинетических энергий всех ее материальных точек:
Вычислим дифференциал от выражения кинетической энергии и выполним некоторые простые преобразования:

Опуская промежуточные значения и применяя ранее введенный для обозначения элементарной работы символ , запишем:

Итак, дифференциал кинетической энергии механической системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на точки системы. В этом и состоит содержание теоремы об изменении кинетической энергии.
Заметим, что сумма работ внутренних сил системы в общем случае не равна нулю. Она обращается в нуль только в некоторых частных случаях: когда системой служит абсолютно твердое тело; система абсолютно твердых тел, взаимодействующих при помощи не-деформируемых элементов (идеальных шарниров, абсолютно твердых стержней, нерастяжимых нитей и т.п.). По этой причине теорема об изменении кинетической энергии является единственной из общих теорем динамики, которая учитывает эффект действия внутренних сил.
Можно интересоваться изменением кинетической энергии не за бесконечно малый промежуток времени, как это делается выше, а за некоторый конечный промежуток времени . Тогда при помощи интегрирования можно получить:

Здесь - значения кинетической энергии соответственно в моменты времени - суммы полных работ внешних и внутренних сил за рассматриваемый промежуток времени.
Полученное равенство выражает теорему об изменении кинетической энергии в конечной (интегральной) форме, которая может быть сформулирована так: изменение кинетической энергии при переходе механической системы из одного положения в другое равно сумме полных работ всех внешних и внутренних сил.




